

Autonomous Coin Robot
- Project Type: Electrical System
- Languages: C, Assembly, Python
- Tech Stack: PuTTY, PyAutoGUI, Various Microcontrollers
- Project Links: GitHub
- Video Demo
Project Details
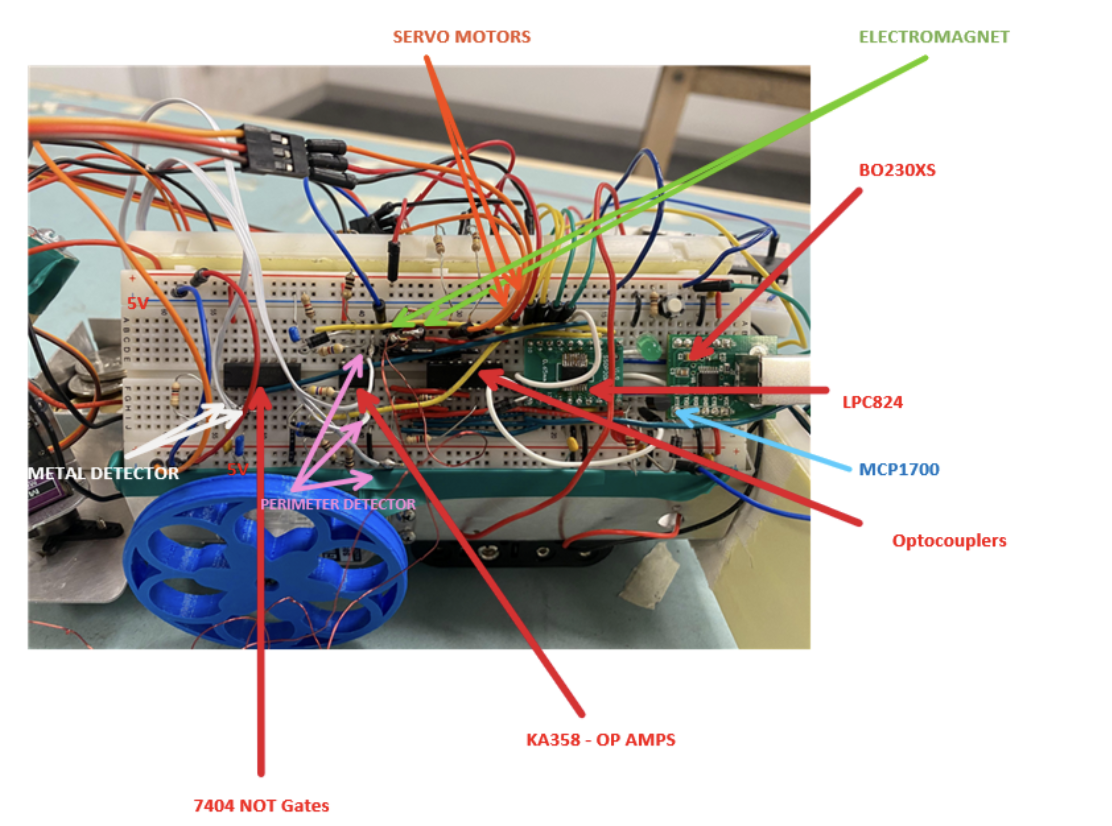
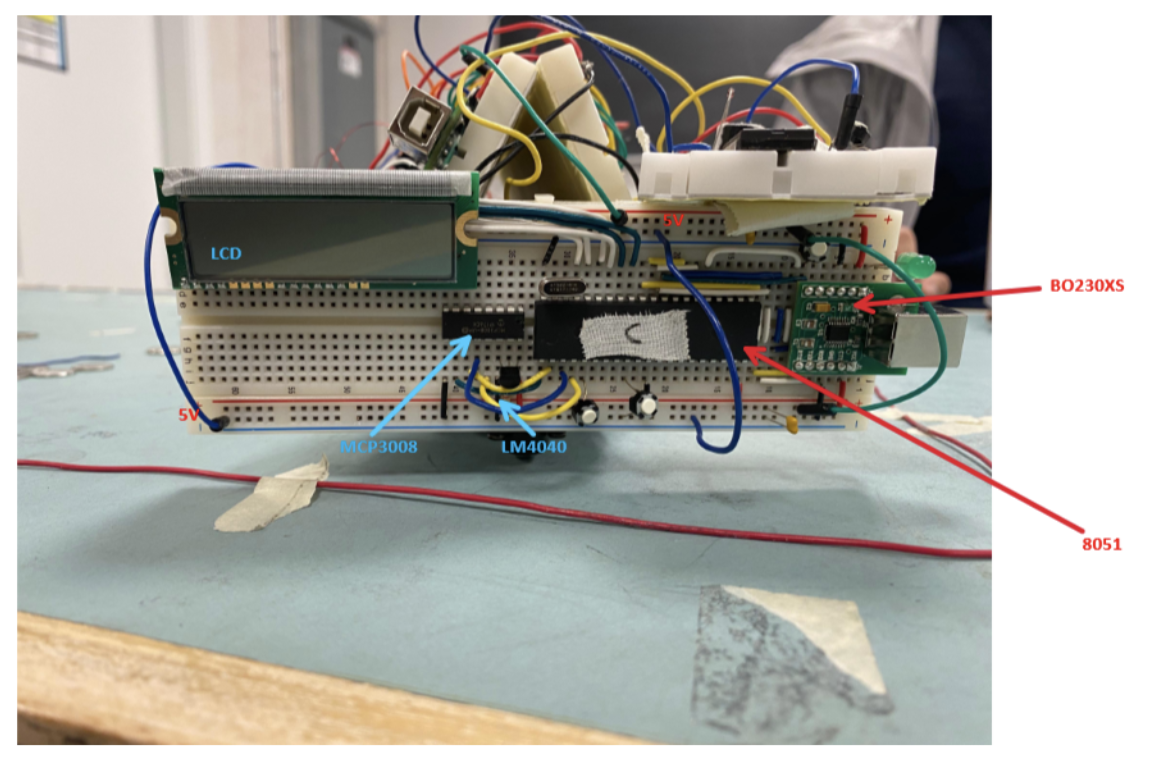
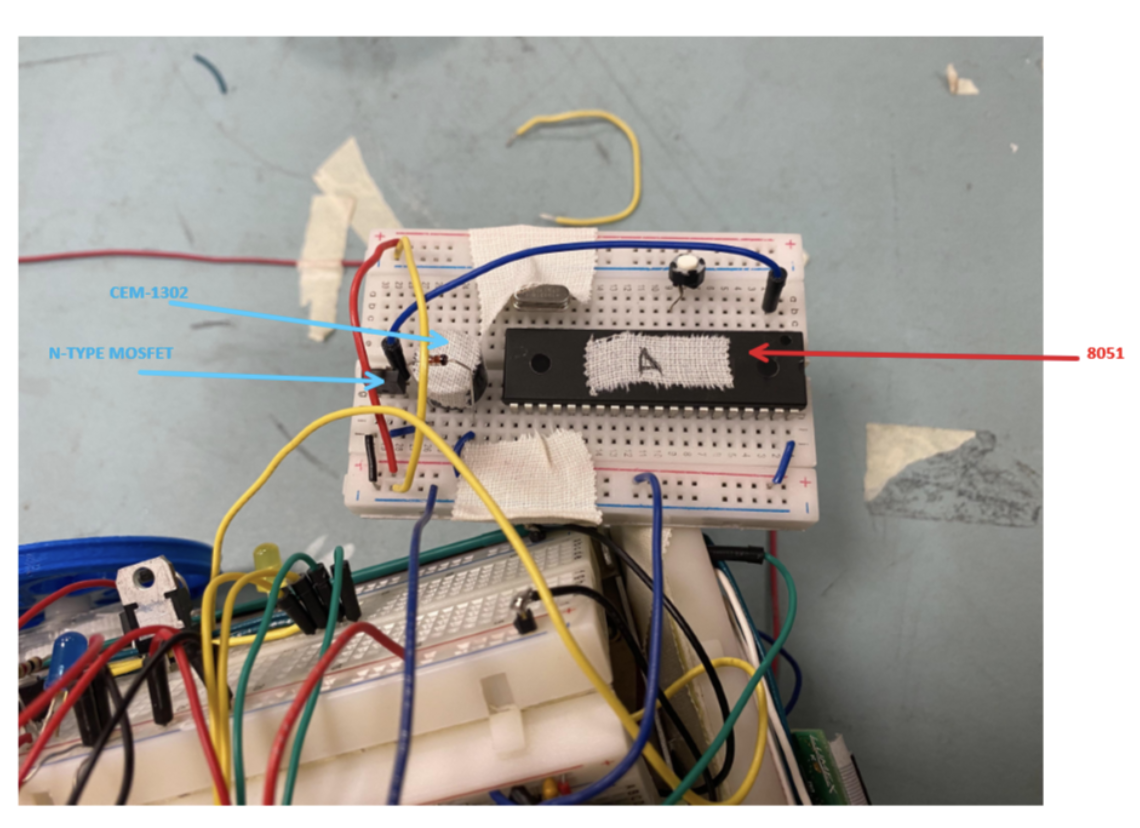
This robot functions autonomously to traverse within a provided perimeter and collect coins. The perimeter is made of a current-carrying wire, which is detected by the robot and guides it to stop, adjust its orientation, and continue moving forward. This was done by connecting the perimeter leads to the robot itself and if the robot neared the perimeter, we would detect a spike above the threshold in the ADC voltage readings on puTTY. I made a metal arm by charging a hand-made coil, mounted onto a servo arm which, similar to the perimeter detector, would move to magnetically pick up a coin in its proximity when it neared an inductor and a spike was detected. It would then rotate and drop the coin into its reservoir, incrementing the coin counter. The main microcontroller used for this project was the LPC824, but the project also utilized two additional 8051 microcontrollers for additional functionalities. The robot itself was built using two H-Bridges, two servo-mechanisms, and an electromagnetic connected in cascade with an optocoupler and perimeter detector. The H-bridges control the movement of the physical robot and allow it to move forward, backward, and turn around. To control the electromagnet, two servos are used so that the electromagnet can move in the x and z planes.